TAI-TECH Advanced Electronics Co., Ltd.
ENGLISH
一般搜尋
進階搜尋
搜尋
進階搜尋
請選擇類別
EMI Suppression Filters
└HFZ Series (High Current Bead Low RDC)
└HFZ1005
└HFZ1608
└HFZ2012
└HFZ3216
└FCM Series (Bead Normal Type)
└FCM0603
└FCM1005
└FCM1608
└FCM2012
└FCM3216
└HCB Series (Bead High Current)
└HCB1005
└HCB1608
└HCB2012
└HCB3216
└HCB4516
└HCB4532
└HCB5750
└BPH Series (Bead Ultra High Current)
└BPH322521W5
└BPH323023W5
└BPH403025R5
└BPH403025MN5
└BPH853025R5
└BPH853025F8E
└FCA Series (Bead Array)
└FCA3216KF4
└MBP Series (Bead High Current)
└MBP15
└MBP18
└MBP21
└MBP31
└MBP41
└MBP43
└MB Series (Bead Normal Type)
└MB15
└MB18
└MB21
└MB31
EMI Suppression Filters
└HFZ Series (High Current Bead Low RDC)
└HFZ1005PV
└HFZ1608PV
└HFZ2012PV
└HFZ3216PV
└HHZ Series (High Current Bead for applications up to 175°C)
└HHZ1608SV
└FCM Series (Bead Normal Type)
└FCM1005_V
└FCM1608_V
└FCM2012_V
└FCM3216_V
└HCB Series (Bead High Current)
└HCB1005_V
└HCB1608_V
└HCB2012_V
└HCB3216_V
└HCB4516_V
└HCB4532_V
└HCB3216KV-500T40
└BPH Series (Bead Ultra High Current)
└BPH323023W5V
└BPH403025R5V
└BPH853025R5V
Transient Voltage Suppressors
└TVS N-Series (TVS Diode High Power/Ethernet)
└TVS0402N
└TVS S-Series (TVS General Used/Diode/ESD)
└TVS0201S
└TVS0402S
└TVS E-Series (General Used/Control Capacitance/ESD)
└TVS0201E
└TVS0402E
└TVS0603E
└TVS EH-Series (Ultra Low Capacitance/ESD/High Speed Date)
└TVS0603EH
└TVS SN-Series (Telecom/Ethernet)
└TVS1206SN
└TVS1210SN
└TVS ML-Series (General Used/Surge)
└TVS0402ML
└TVS0603ML
Common Mode Choke
└WCM Series (Wire Wound Common Mode Choke Normal Type)
└WCM1608F2SN
└WCM1210F2S
└WCM2012F2S
└WCM3216F2S
└WCM3225F2S
└WCM4015F2SF
└WCM4532F2S
└WCM4532F2S-HI
└WCM5025F2S
└WCM7060FAS
└WCM7060CLF2
└WCM9070
└WCM1211F
└HDMI/DVI Series (Wire Wound Common Mode Choke HDMI)
└HDMI2012F2S
└HSF Series (Wire Wound Common Mode Choke USB 3.0)
└HSF1210F2S
└HSF2012F2S-H
└HSF Series (Wire Wound Common Mode Choke USB 4.0)
└HSF1210F2S-U4
└ACM Series (Wire Wound Common Mode Choke L type)
└ACM3225F2S
└ACM3225F2DF-D
└ACM4532F2NF-D
└DCM Series (Wire Wound Common Mode Choke Ethernet)
└DCM321620F2S
└DCM321620F2U
└DCM3532F2S
└DCM3532F2U
└DCM4532F2U
└TCM Series (Wire Wound Common Mode Choke 3 Wires)
└TCM322512F3SFK
└WCL Series (Wire Wound Common Mode Choke Normal Type)
└WCL21S
└MCF Series (Mini CMF)
└MCF0605YTF2
└MCF0605YGF2
└MCF0806YSF2
└MCF0806YGF2
Common Mode Choke
└APOC Series (Wire Wound Type Common Mode Filter For Power Over Coaxial)
└APOC2012F2SV
└WCM Series (Wire Wound Common Mode Choke Normal Type)
└WCM2012F2SV
└WCM3216F2SV
└WCM3225F2SV
└WCM4532F2SV
└WCM4532F2SV-HI
└WCM5555FASV
└WCM7060FASV
└WCM9070FASV
└WCM1211FASV
└WCM1513FASV
└WCMU Series (Wire Wound Common Mode Choke Normal Type)
└WCMU4936F2SV-HI
└HDMI-Series (Wire Wound Common Mode Choke HDMI)
└HDMI2012F2SV
└HSF Series (Wire Wound Common Mode Choke USB 3.0)
└HSF1210F2SV
└HSF2012F2SV-H
└ACM Series (Wire Wound Common Mode Choke L type)
└ACM3225F2SV
└ACM3225F2DV
└ACM3225F2DV-D
└ACM3225F2UV-S
└ACM3225F2RV-T
└ACM3225F2WV-D
└ACM4532F2NV-D
└ACM4532F2WV-D
└ACM4532F2NV-T
└ACM6545F2NV-T
└ACM9152-L
└ACM9152-Z
└FACM Series (Wire Wound Common Mode Choke L type)
└FACM4532F2NV-D
└ACMU Series (Wire Wound Common Mode Choke L type)
└ACMU4936F2NV-D
└DCM-Series (Wire Wound Common Mode Choke Ethernet)
└DCM321620F2SV
└DCM3532F2SV
Chip Coils / Inductors
└SWF-L Series (Wire Wound inductor)
└SWF1608LF
└SWF-C Series (Wire Wound inductor)
└SWF1608CF
└SWF2012CF
└SWF2520CF
└SWF3225CF
└SWF-RIF Series (Wire Wound inductor for TWS Ear Phone)
└SWF1608RIF
└SWF1608RIF-SERIES-X5
└SWF2012RIF
└SWF2012RIF-SERIES-X5
└HCI Series (Chip HF Inductor)
└HCI0603FQ
└HCI1005FQ
└SWI Series (Wire Wound HF Inductor)
└SWI0402F-HC
└SWI0603F
└SWI0805F
└SWI0805UF
└SWI1008UF
└MCI Series (Chip Inductor)
└MCI18
└MCI21
└THI Series (Chip HF Inductor)
└THI18
└SWC-I Series (Wire Wound HF Inductor)
└SWC108I
└SWC42I
└SWC63I
└SWC85I
└SWC-C Series (Wire Wound Inductor)
└SWC18FC
└SWC252FC
└SWC32FC
└SWF-FC Series (Wire Wound Inductor)
└SWF21FC
└SNL-Series (Wire Wound inductor)
└SNL252018QF
└SNL322522QF
└SNL252018CF
└SNL322522CF
└WNL-Series (Wire Wound inductor)
└WNL252018RF
└WNL322522RF
└FCI Series (Chip Inductor)
└FCI1005
└FCI1608
└FCI2012
Chip Coils / Inductors
└APO Series(Inductors for decoupling circuits Wound ferrite )
└APO322523NV
└APO322530NV
└APO322523TV
└APO201216NV
└FCI Series (Chip Inductor)
└FCI1005V
└FCI1608V
└FCI2012V
└FCI3216V
└SWF-C Series (Wire Wound inductor)
└SWF1608CV
└SWF2012CV
└SWF2520CV
└SWF3225CV
└SWF-L Series (Wire Wound inductor)
└SWF1608LV
└SWI Series (Wire Wound HF Inductor)
└SWI0603V
└SWI0805V
└SWI0805UV
└SWI1008UV
└SWIU Series (Wire Wound HF Inductor)
└SWIU0603V
└SWIU0805V
└SNLU-Series (Wire Wound inductor)
└SNLU252018CV
└SNLU252018QV
└SNLU322522CV
└SNLU322522QV
└WNLU-Series (Wire Wound inductor)
└WNLU252018RV
└WNLU322522RV
Hi-Current Power Inductors
└THMA-Series (Hot-Press Molding Power Inductor)
└THMA0301S
└THMA040HS
└THMA0421SP
└THMA0503SP
└THMC-Series (Hot-Press Molding Power Inductor)
└THMC0421SP
└THMC0503SP
└SEPI Series (Assembly Type Low DCR Inductor)
└SEPI060690LN
└SEPI805080LN
└SEPI090610LN
└SEPI090612LN
└SEPI106012LN
└SLPI Series (Assembly Type Low DCR Inductor)
└SLPI404240S
└SLPI040430S
└SLPI070805ST
└SLPI100807S
└SLPI100875S
└SLPI107975ST
└TLVR Series (Trans-Inductor Voltage Regulator)
└TLVR966411
└TLVR100512
└TLVR110511
└TMIM Series (Molding Mini High Isat)
└TMIM201610A
└TMIM252010A
└TMIM252012A
└TMIM322510A
└TMIM322512A
└TMPA Series (Molding High Irms)
└TMPA0503S
└TMPA0603S
└TMPA0604S
└TMPA0605S
└TMPA1003S
└TMPA1004S
└TMPA1005S
└TMPA1205SP
└TMPA1206SP
└TMPA1265SP
└TMPA1707SP
└TMPA2313SP
└TMPA404010S
└TMPA606010SP
└TMPA0603S-TAD
└TMPC Series (Molding High Isat)
└TMPC0312H
└TMPC0315H
└TMPC0302H
└TMPC0412HP
└TMPC0415HP
└TMPC0402HP
└TMPC0512HP
└TMPC0515HP
└TMPC0518HP
└TMPC0502HP
└TMPC0503HP
└TMPC0503H
└TMPC053T
└TMPC0612H
└TMPC0615H
└TMPC0618H
└TMPC0602H
└TMPC0624H
└TMPC0603H
└TMPC0604H
└TMPC0605H
└TMPC8040HP
└TMPC1002H
└TMPC1003H
└TMPC1004H
└TMPC1005H
└TMPC120804H
└TMPC1235HP
└TMPC1205HP
└TMPC1206HP
└TMPC1265HP
└TMPC1707HP
└TMPF Series (Molding Low RDC)
└TMPF0402A-ABD
└TMPF0402LR-ABD
└TMPF0403LR-ABD
└TMPF0502A-ABD
└TMPF0503A-ABD
└TMPF0505LR-ABD
└TMPF0603A-ABD
└TMPF0605A-ABD
└TMPF0606A-ABD
└TMPF0606LR-ABD
└TMPF0702A-ABD
└TMPF0703A-ABD
└TMPF0705A-ABD
└TMPF0707A-ABD
└TMPF0808A-ABD
└TMPF1006A-ABD
└TMPF1010A-ABD
└TMPF1031LR-ABD
└TMPF1508A-ABD
└TMPF1510A-ABD
└TMPF1513A-ABD
└TMPF0402A
└TMPF0402LR
└TMPF0403LR
└TMPF0502A
└TMPF0503A
└TMPF0505LR
└TMPF0603A
└TMPF0605A
└TMPF0606LR
└TMPF0702A
└TMPF0703A
└TMPF0705A
└TMPF0707A
└TMPF1508A
└TMPF1510A
└TMPF1513A
└TBMA Series (Molding Twin Inductor)
└TBMA1004P4
└VMPI Series (Molding Power Inductor)
└VMPI73A
└VMPI42F
└VMPI42CP
└VMPI58CP
└VMPI104C
└AWP Series (Molding Mini Inductor)
└AWP252010FW
└AWP252012FW
└TMHC Series (Molding Power Inductor)
└TMHC0603S-JDX
└TMPV Series
└TMPV0604FC-JDX
└TMPV0642FC-JDX
└TMPV0649FC-JDX
└TMPV1044FC-JDX
└TMPV1004FC-JDX
Hi-Current Power Inductors
└FTMP Series (Molding High Isat)
└FTMP0302HV
└FMPA Series (Molding High Irms)
└FMPA0503SV
└FMPV Series
└FMPV0504SPV
└FMPV0754SV
└THMA-Series (Hot-Press Molding Power Inductor)
└THMA0421SPV-FL
└FMIM Series (Molding Mini High Isat)
└FMIM252012AV
└FMIM322512AV
└TVMP Series (Ultra Low DCR Inductor)
└TVMP120611LNV
└TBMA Series (Molding Twin Inductor)
└TBMA1004P4V
└TMPA Series (Molding High Irms)
└TMPA0603SV-FL
└TMPA0503SV
└TMPA0603SV
└TMPA0603HTV
└TMPA0604SV
└TMPA0605SV
└TMPA1004SV
└TMPA1004HTV
└TMPA1005SV
└TMPA1205SPV
└TMPA1206SPV
└TMPA1265SPV
└TMPA1707SPV
└TMPA2313SPV
└TMPC Series (Molding High Isat)
└TMPC0302HV
└TMPC0312HV
└TMPC0315HV
└TMPC0402HPV
└TMPC0412HPV
└TMPC0415HPV
└TMPC0502HPV
└TMPC0503HPV
└TMPC0503HV
└TMPC0512HPV
└TMPC0515HPV
└TMPC0518HPV
└TMPC053TV
└TMPC0602HV
└TMPC0603HV
└TMPC0604HV
└TMPC0605HV
└TMPC0612HV
└TMPC0615HV
└TMPC0618HV
└TMPC0624HV
└TMPC1003HV
└TMPC1004HV
└TMPC1005HV
└TMPC1205HPV
└TMPC1206HPV
└TMPC1235HPV
└TMPC1265HPV
└TMPC1707HPV
└TMPF Series (Molding Low RDC)
└TMPF0402AV-ABD
└TMPF0402LRV-ABD
└TMPF0403LRV-ABD
└TMPF0502AV-ABD
└TMPF0503AV-ABD
└TMPF0505LRV-ABD
└TMPF0603AV-ABD
└TMPF0605AV-ABD
└TMPF0606AV-ABD
└TMPF0606LRV-ABD
└TMPF0702AV-ABD
└TMPF0703AV-ABD
└TMPF0705AV-ABD
└TMPF0707AV-ABD
└TMPF0808AV-ABD
└TMPF1006AV-ABD
└TMPF1010AV-ABD
└TMPF1031LRV-ABD
└TMPF1508AV-ABD
└TMPF1510AV-ABD
└TMPF1513AV-ABD
└TMPF0402AV
└TMPF0402LRV
└TMPF0403LRV
└TMPF0502AV
└TMPF0503AV
└TMPF0505LRV
└TMPF0603AV
└TMPF0605AV
└TMPF0606LRV
└TMPF0702AV
└TMPF0703AV
└TMPF0705AV
└TMPF0707AV
└TMPF1508AV
└TMPF1510AV
└TMPF1513AV
└TMPV Series
└TMPV0503SPV
└TMPV0603SV
└TMPV1004SV
└TMPV1054SV
└TMPV1265SPV
SMD Power Inductors
└FCH Series (Chip Power Inductor)
└FCH160808SF
└CPI Series (Chip Power Inductor)
└CPI160809UF
└CPI201210UF
└CPI201610UF
└MPI Series (Chip Power Inductor)
└MPI160809M
└MPI160809S
└MPI201210M
└MPI201210S
└MPI201610M
└MPI201610S
└HPC Series (Wire Wound Shielding)
└HPC160809TF
└HPC201610CF
└HPC252012CF
└HPC252008MF
└HPC3010TF
└HPC3012TF
└HPC3015TF
└HPC4010TF
└HPC4012TF
└HPC4015TF
└HPC4018NF
└HPC4018BM
└HPC5020NF
└HPC5040NF
└HPC6020NF
└HPC6028NF
└HPC6045NC
└HPC8040NC
└DFP Series (Wire Wound Shielding Higher Isat)
└DFP201610TF
└DFP201612NF
└DFP252010BF
└DFP252012BF
└DFP3010EF
└DFP3012EF
└DFP322510BF
└DFP322512BF
└DFP4010EF
└DFP4012EF
└AHP Series (Wire Wound Isat)
└AHP160808FA
└AHP160808RA
└AHP201208FA
└AHP201208RA
└AHP201210FA
└AHP201210RA
└AHP201608FA
└AHP201608RA
└AHP201610FA
└AHP201610RA
└AHP252008FA
└AHP252008RA
└AHP252010FA
└AHP252010RA
└AHP252012FA
└AHP252012RA
└AHP3008FA
└AHP3008RA
└AHP3010HF
└AHP3012HF
└AHP3015RA
└AHP322508FA
└AHP322508RA
└AHP322510FA
└AHP322512FA
└AHP322512RA
└AHP4008RA
└AHP4010HF
└AHP4012HF
└FPI Series (Wire Wound No Shielding)
└FPI0302BM
└FPI0403BM
└FPI0503BM
└FPI0504BM
└FPI0703BM
└FPI0705BM
└MCP Series (Chip Power Inductor)
└MCP2110U
└MCP21610U
└MCP25210U
└CMPI Series (Chip Power Inductor)
└CMPI252010
└YHC Series (Shielding Type)
└YHC48B
└YHC43N
└YHC514N
└YHC614N
└YHC814N
└YHC21610UN
└YHC42T
└YHC48N
└UHP Series (Wire Wound Low RDC)
└UHP160808TF
└UHP201210RF
└UHP201208TF
└UHP201610NF
└UHP252010BF
└UHP252012BF
SMD Power Inductors
└HPC Series (Wire Wound Shielding)
└HPC201610BMV
└HPC201612BMV
└HPC252010BMV
└HPC252012BMV
└HPC3010BMV
└HPC3012BMV
└HPC3015BMV
└HPC4018BMV
└HPC4030NV
└HPC5020NV
└HPC5040NV
└HPC6020NV
└HPC6028NV
└HPC6045NV
└HPC8040NV
└AHP Series (Wire Wound Isat)
└AHP201610BMV
└AHP201612BMV
└AHP252010BMV
└AHP252012BMV
└AHP3012BMV
└AHP3015BMV
└AHP4020BMV
LAN X'former
└TXF Series(SMD Pulse Transformer)
└TXF403829N-7P
└TXF464429N-7P
└TXF-Series-G (SMD Pulse Transformer for 2.5G/5G)
└TXF403829N-7P-G
└TXF-Series-S (SMD Pulse Transformer for 10G)
└TXF403829N-7P-S
└LAN Series (LAN Module)
└LAN-12M162/165_P-SERIES
└LAN-12M162_S-Series
└LAN-16G241/242_P-Series
└LAN-16G241S1A8
└WCM Series-G (Common Mode Choke for 2.5G/5G)
└WCM2012F2SF-G
└WCM Series-H (Common Mode Choke for 10G)
└WCM2012F2SF-H
Low-Frequency Antenna
└PAS Seires
└PAS1225F
└PAS201615F
└PAS3010EF
└PAS3012EF
└PAS3015EF
└PAS4018EF
└PAS4420F-F10
└PAS6420F
└PAS8027F
Low-Frequency Antenna
└PAS Series
└PAS1225V
└PAS201615V
└PAS3010EV
└PAS3012EV
└PAS3015EV
└PAS4018EV
└PAS4420V-F10
└PAS6420V
└PAS8027V
└PASU Series
└PASU1225V
└PASU3225V
└PASU4420V
└PASU6420V
└PASU8027V
Balun Filters
└BCM SERIES
└BCM2012F2S
└BCM3225F3S-P
Balun Filters
└BCM Series
└BCM2012F2SV
進階搜尋
ENGLISH
關於我們
最新消息
產品應用
車用
網通
NB
TV
手機
磁損耗計算
產品資訊
最新產品
一般
EMI Suppression Filters
HFZ Series (High Current Bead Low RDC)
FCM Series (Bead Normal Type)
HCB Series (Bead High Current)
BPH Series (Bead Ultra High Current)
FCA Series (Bead Array)
MBP Series (Bead High Current)
MB Series (Bead Normal Type)
Transient Voltage Suppressors
TVS N-Series (TVS Diode High Power/Ethernet)
TVS S-Series (TVS General Used/Diode/ESD)
TVS E-Series (General Used/Control Capacitance/ESD)
TVS EH-Series (Ultra Low Capacitance/ESD/High Speed Date)
TVS SN-Series (Telecom/Ethernet)
TVS ML-Series (General Used/Surge)
Common Mode Choke
WCM Series (Wire Wound Common Mode Choke Normal Type)
HDMI/DVI Series (Wire Wound Common Mode Choke HDMI)
HSF Series (Wire Wound Common Mode Choke USB 3.0)
HSF Series (Wire Wound Common Mode Choke USB 4.0)
ACM Series (Wire Wound Common Mode Choke L type)
DCM Series (Wire Wound Common Mode Choke Ethernet)
TCM Series (Wire Wound Common Mode Choke 3 Wires)
WCL Series (Wire Wound Common Mode Choke Normal Type)
MCF Series (Mini CMF)
Chip Coils / Inductors
SWF-L Series (Wire Wound inductor)
SWF-C Series (Wire Wound inductor)
SWF-RIF Series (Wire Wound inductor for TWS Ear Phone)
HCI Series (Chip HF Inductor)
SWI Series (Wire Wound HF Inductor)
MCI Series (Chip Inductor)
THI Series (Chip HF Inductor)
SWC-I Series (Wire Wound HF Inductor)
SWC-C Series (Wire Wound Inductor)
SWF-FC Series (Wire Wound Inductor)
SNL-Series (Wire Wound inductor)
WNL-Series (Wire Wound inductor)
FCI Series (Chip Inductor)
Hi-Current Power Inductors
THMA-Series (Hot-Press Molding Power Inductor)
THMC-Series (Hot-Press Molding Power Inductor)
SEPI Series (Assembly Type Low DCR Inductor)
SLPI Series (Assembly Type Low DCR Inductor)
TLVR Series (Trans-Inductor Voltage Regulator)
TMIM Series (Molding Mini High Isat)
TMPA Series (Molding High Irms)
TMPC Series (Molding High Isat)
TMPF Series (Molding Low RDC)
TBMA Series (Molding Twin Inductor)
VMPI Series (Molding Power Inductor)
AWP Series (Molding Mini Inductor)
TMHC Series (Molding Power Inductor)
TMPV Series
SMD Power Inductors
FCH Series (Chip Power Inductor)
CPI Series (Chip Power Inductor)
MPI Series (Chip Power Inductor)
HPC Series (Wire Wound Shielding)
DFP Series (Wire Wound Shielding Higher Isat)
AHP Series (Wire Wound Isat)
FPI Series (Wire Wound No Shielding)
MCP Series (Chip Power Inductor)
CMPI Series (Chip Power Inductor)
YHC Series (Shielding Type)
UHP Series (Wire Wound Low RDC)
LAN X'former
TXF Series(SMD Pulse Transformer)
TXF-Series-G (SMD Pulse Transformer for 2.5G/5G)
TXF-Series-S (SMD Pulse Transformer for 10G)
LAN Series (LAN Module)
WCM Series-G (Common Mode Choke for 2.5G/5G)
WCM Series-H (Common Mode Choke for 10G)
Low-Frequency Antenna
PAS Seires
Balun Filters
BCM SERIES
車用
EMI Suppression Filters
HFZ Series (High Current Bead Low RDC)
HHZ Series (High Current Bead for applications up to 175°C)
FCM Series (Bead Normal Type)
HCB Series (Bead High Current)
BPH Series (Bead Ultra High Current)
Common Mode Choke
APOC Series (Wire Wound Type Common Mode Filter For Power Over Coaxial)
WCM Series (Wire Wound Common Mode Choke Normal Type)
WCMU Series (Wire Wound Common Mode Choke Normal Type)
HDMI-Series (Wire Wound Common Mode Choke HDMI)
HSF Series (Wire Wound Common Mode Choke USB 3.0)
ACM Series (Wire Wound Common Mode Choke L type)
FACM Series (Wire Wound Common Mode Choke L type)
ACMU Series (Wire Wound Common Mode Choke L type)
DCM-Series (Wire Wound Common Mode Choke Ethernet)
Chip Coils / Inductors
APO Series(Inductors for decoupling circuits Wound ferrite )
FCI Series (Chip Inductor)
SWF-C Series (Wire Wound inductor)
SWF-L Series (Wire Wound inductor)
SWI Series (Wire Wound HF Inductor)
SWIU Series (Wire Wound HF Inductor)
SNLU-Series (Wire Wound inductor)
WNLU-Series (Wire Wound inductor)
Hi-Current Power Inductors
FTMP Series (Molding High Isat)
FMPA Series (Molding High Irms)
FMPV Series
THMA-Series (Hot-Press Molding Power Inductor)
FMIM Series (Molding Mini High Isat)
TVMP Series (Ultra Low DCR Inductor)
TBMA Series (Molding Twin Inductor)
TMPA Series (Molding High Irms)
TMPC Series (Molding High Isat)
TMPF Series (Molding Low RDC)
TMPV Series
SMD Power Inductors
HPC Series (Wire Wound Shielding)
AHP Series (Wire Wound Isat)
Low-Frequency Antenna
PAS Series
PASU Series
Balun Filters
BCM Series
投資人專區
公司治理專區
資料中心
人力資訊
聯絡我們
一般
車用
test
test2
test3
test
test2
test3
test
test2
test3
test
test2
test3
test
test2
test3
test
test2
test3
test
test2
test3
test
test2
test3
ENGLISH
NEWS
最新消息
首頁
產品消息
Buck Part 3 – Control System 電路設計
選擇訊息分類
最新消息
法說會訊息
活動訊息
產品消息
選擇年份
2024
2023
2022
2021
2020
2019
2018
2017
送出搜尋項目
關鍵字搜尋
訊息分類
最新消息
法說會訊息
活動訊息
產品消息
2022-09-20
Buck Part 3 – Control System 電路設計
Facebook
Google plus
Twitter
主題
:
Buck Part 3 – Control System
電路設計
學習電路穩定補償的邏輯順序如下:
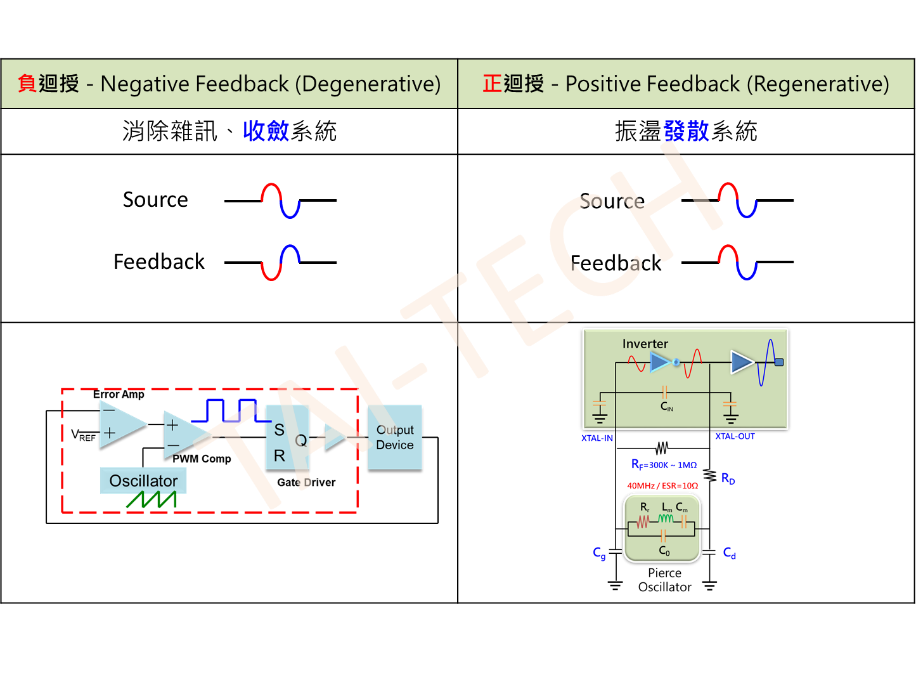
1.)「負迴授」、「正迴授」的差異
2.)頻率響應波德圖
3.)穩定的條件
4.)迴授控制模式類別
5.)「開迴路」、「閉迴路」轉換方程式與頻率響應圖
6.)補償電路類別
7.)補償電路設計順序
8.)電路驗證
下列以圖示的方法,介紹學習重點
「負迴授」、「正迴授」的差異
正迴授:振盪發散系統,例如Clock (時脈)。
負迴授:收斂穩定系統,例如
DC/DC 迴授穩定輸出電壓,電路穩定補償期望操作在「負迴授」。
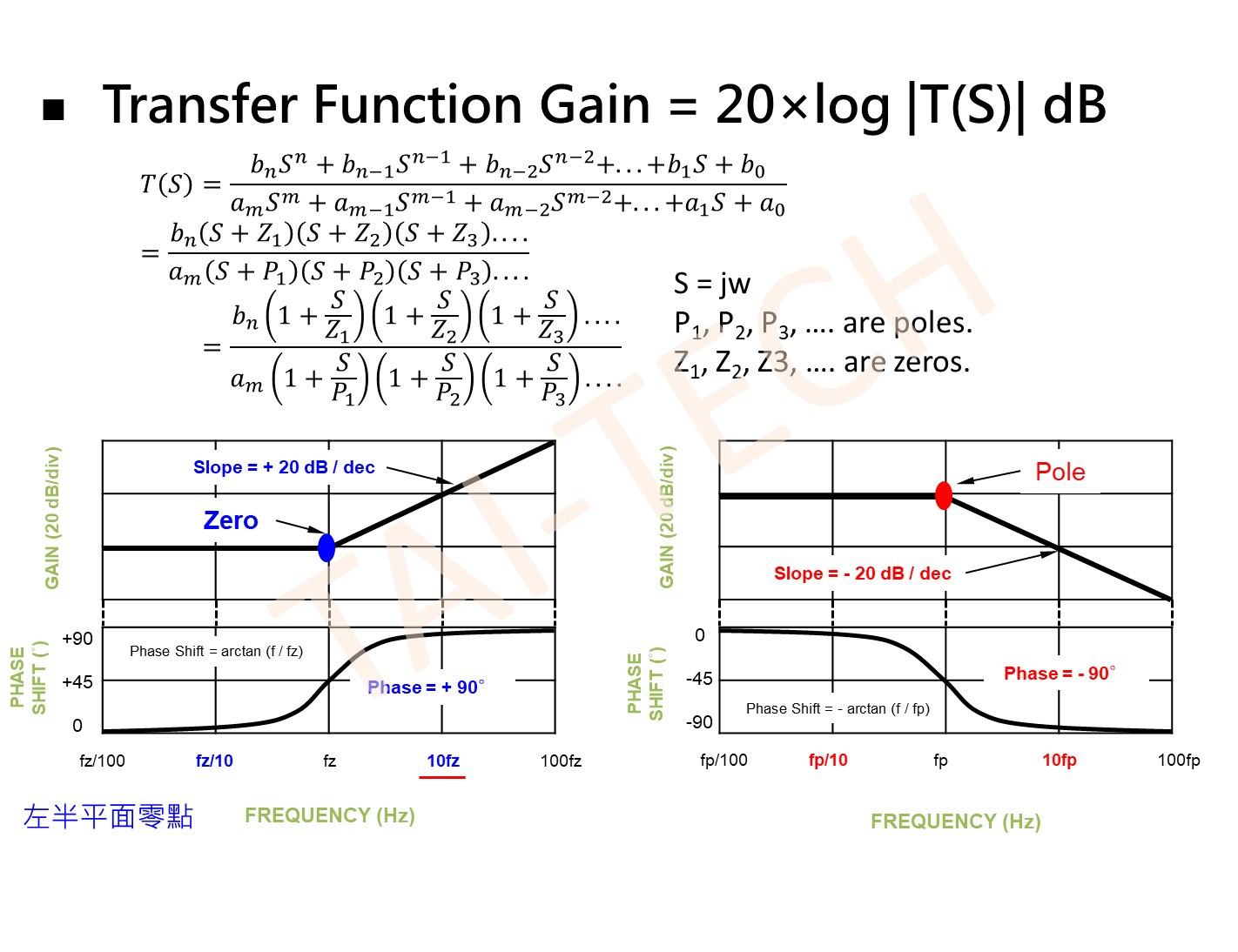
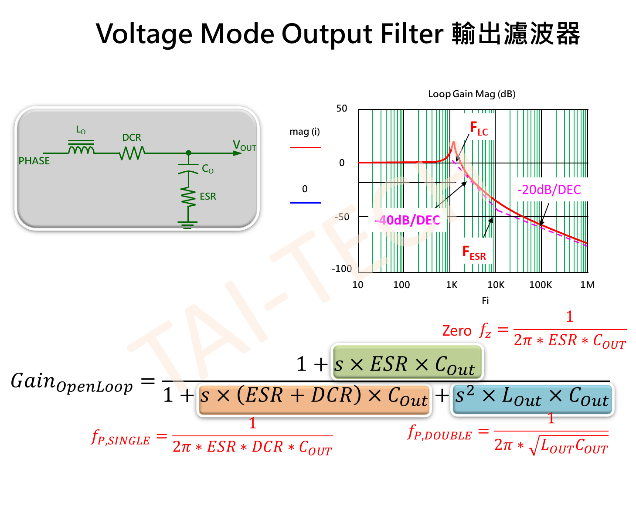
頻率響應波德圖
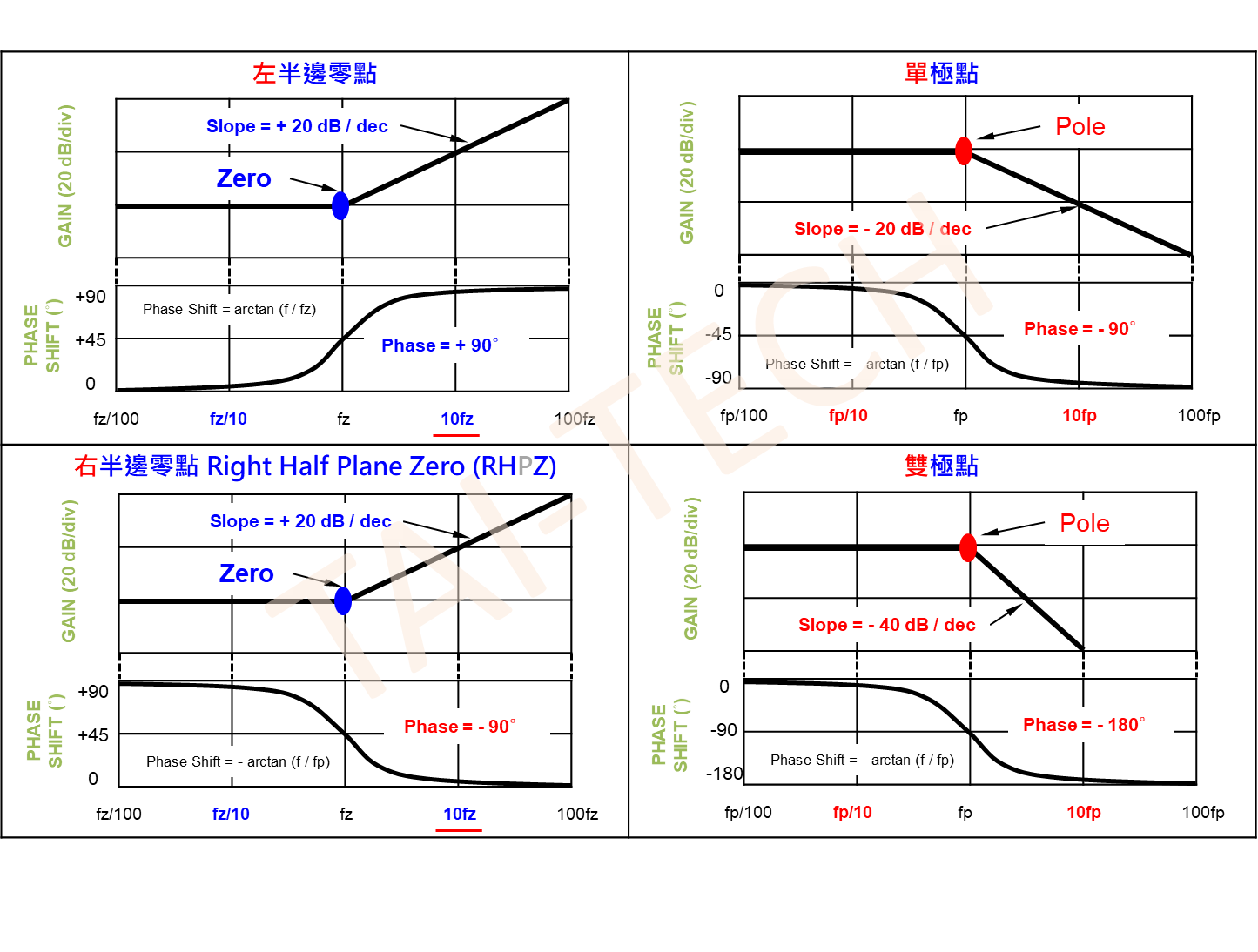
透過轉換函數找出零點(Zero)與極點(Pole)
零點與極點對於增益(Gain)及相位(Phase)的貢獻。例如Buck電壓控制模式(Voltage Control Mode)的輸出濾波器 (Output Filter),其中輸出電感與電容會貢獻兩個極點(Double Pole)、輸出電容的ESR會貢獻一個零點。
零點極點比較圖
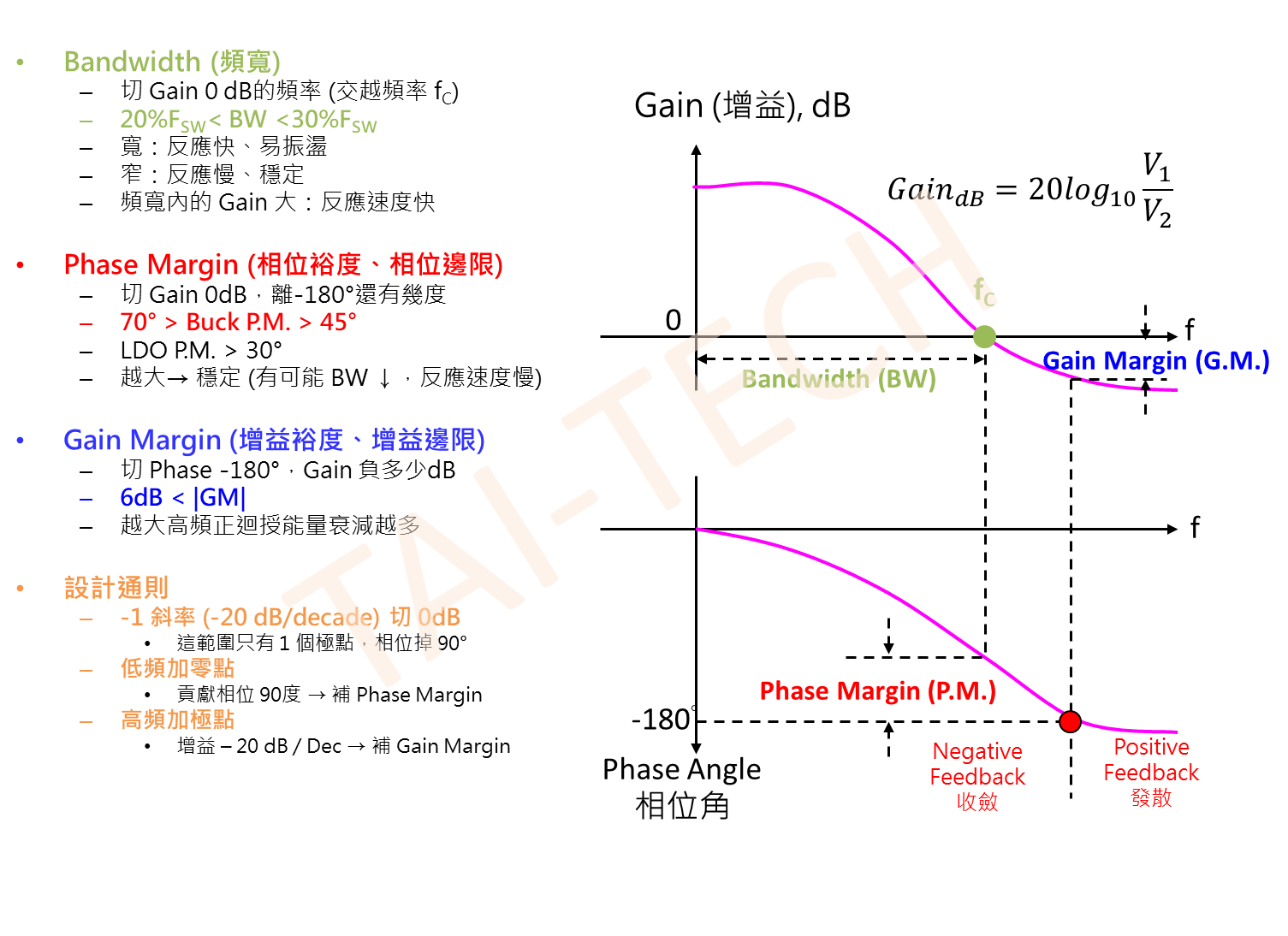
穩定的條件
了解相位邊限(Phase Margin, P.M.)、增益邊限(Gain Margin, G.M.)、頻寬(Bandwidth, BW)的定義,及各項參數對於電路的影響,並規範不同電路下的穩定條件,例如較寬頻寬相對對於負載轉態反應速度較快。
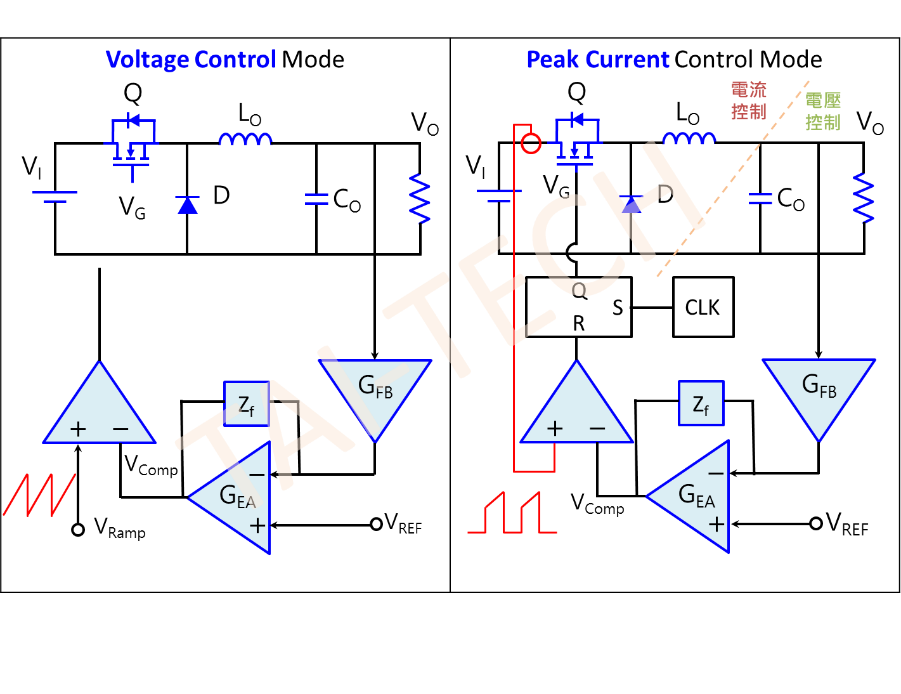
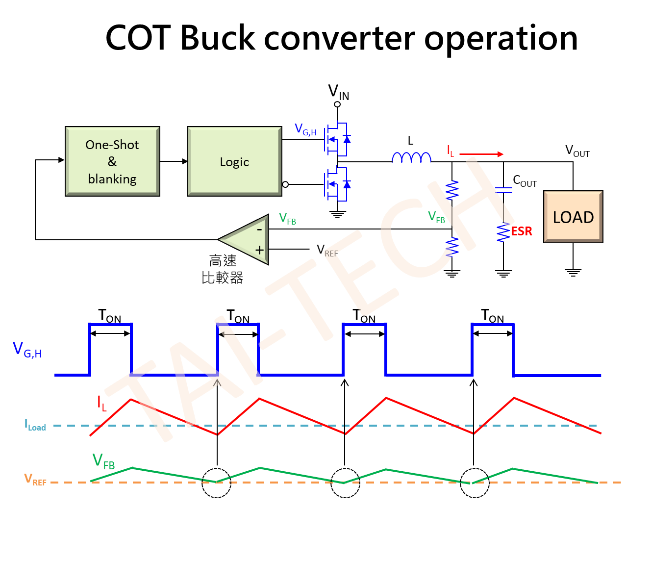
迴授控制模式類別
了解電「壓控制模式、峰值or平均電流控制模式、COT控制模式」的動作原理及優缺點,搭配「輸出電容串聯等效阻抗、補償模式」管理電路穩定、反應速度、成本關係。
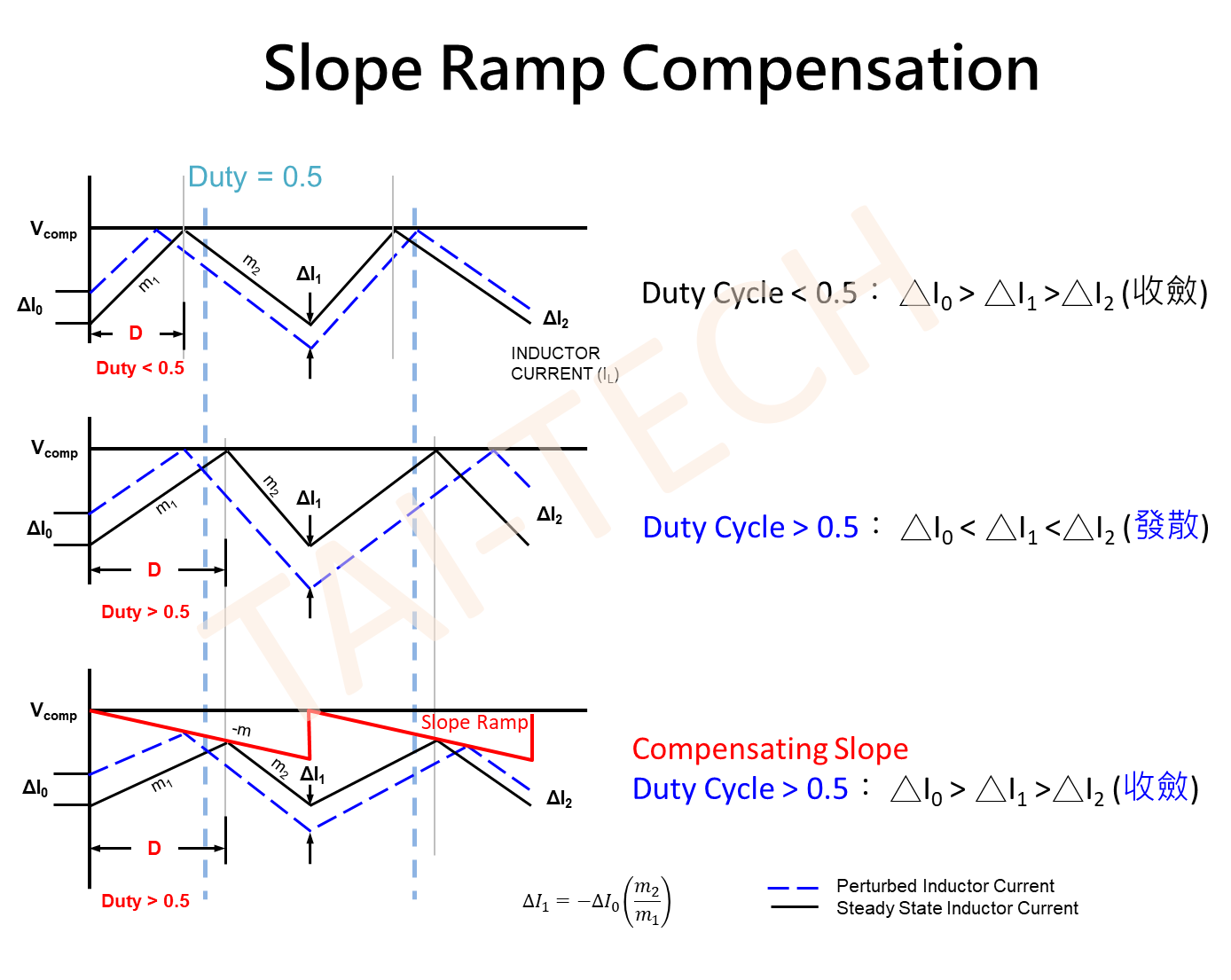
在Peak Current Mode 當Duty > 50%會造成不穩定,衍生另一個專有名詞斜率補償(Slop Compensation)。斜率補償的標的物是Duty,後續介紹Type 2 or 3的穩定補償(Compensation)的標的物為相位邊限、增益邊限、頻寬。
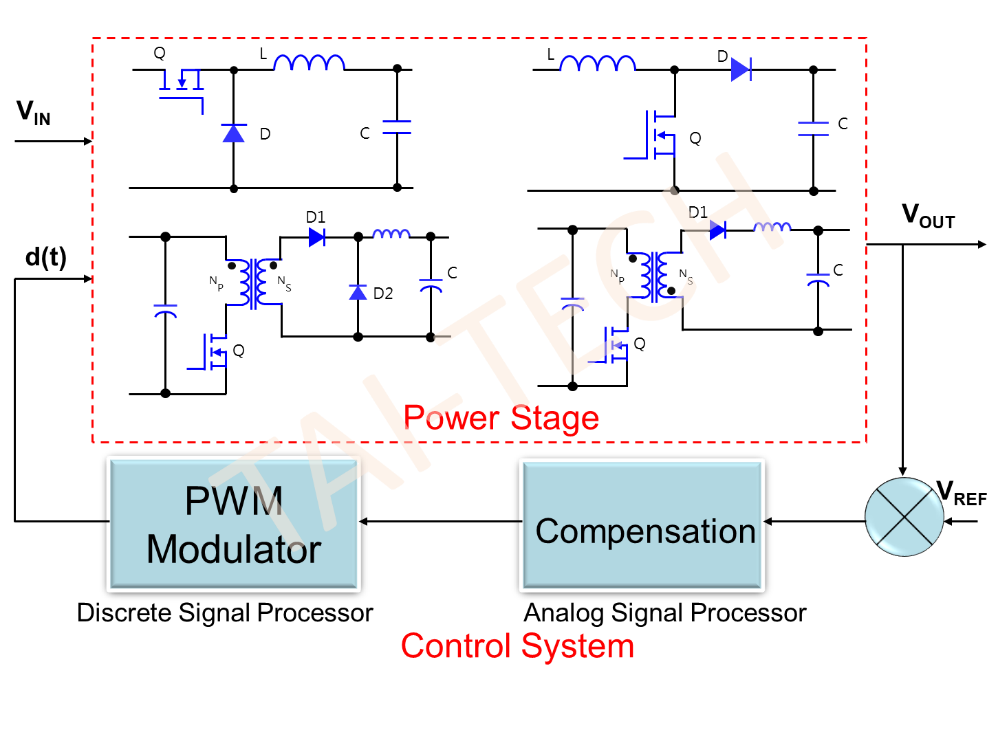
「開迴路」、「閉迴路」轉換方程式與頻率響應圖
閉迴路的動作模式及頻率響應
個別方塊開迴路的頻率響應
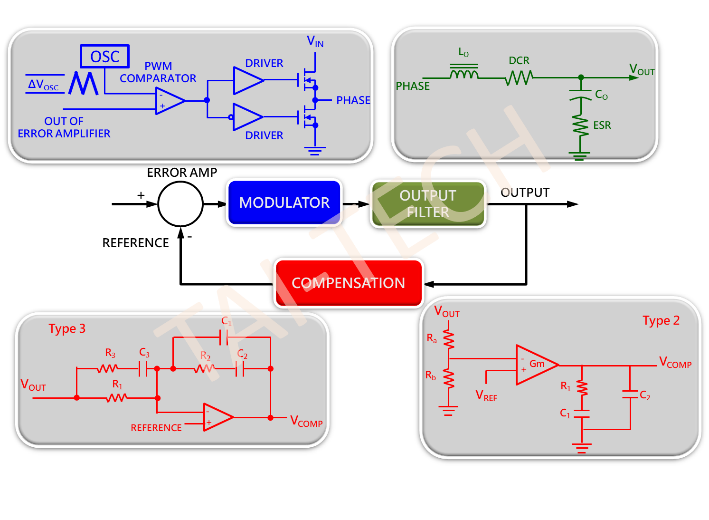
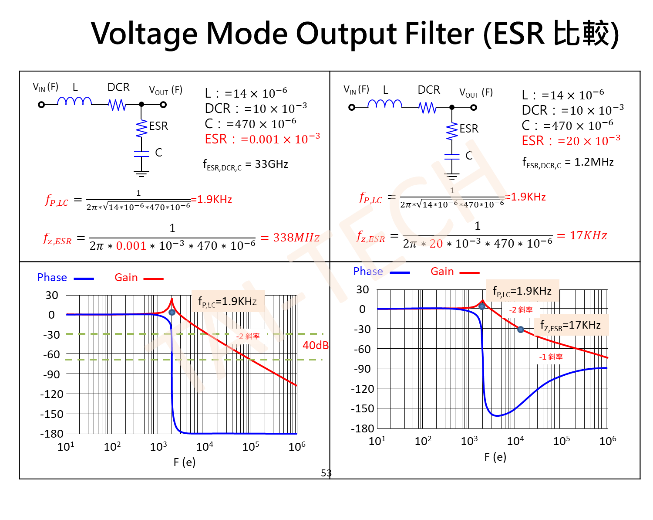
以下列舉Voltage Control Mode介紹迴授控制。
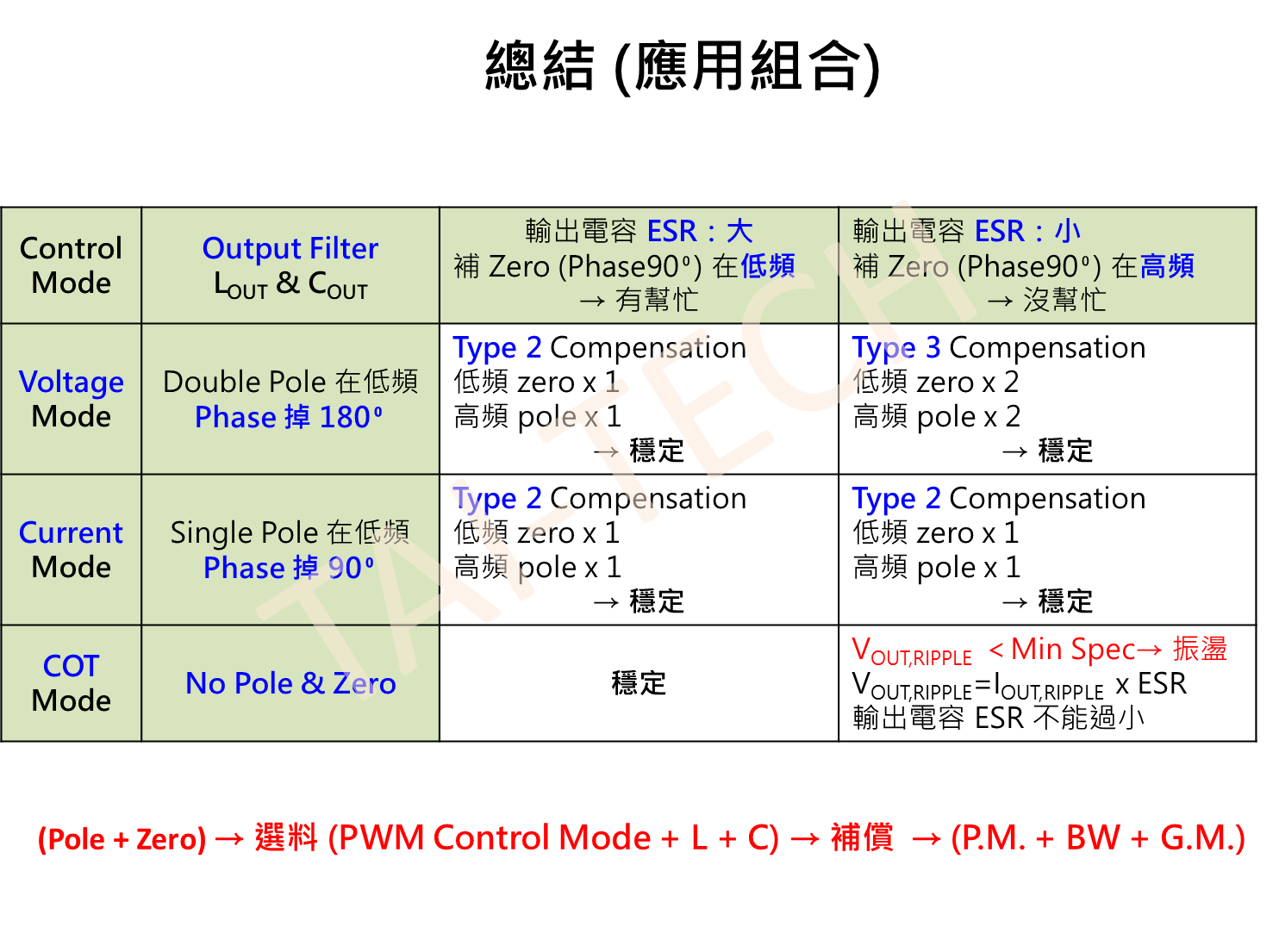
注意在電壓控制模式下,輸出電容與輸出電感會產生一個 Double Pole,使相位下降180°。另外選擇是當大的輸出電容等效串聯阻抗(ESR),可以在低頻產生一個Zero及使相位上升90°。當ESR太小,則Zero產生在高頻,對於穩定幫助不大。
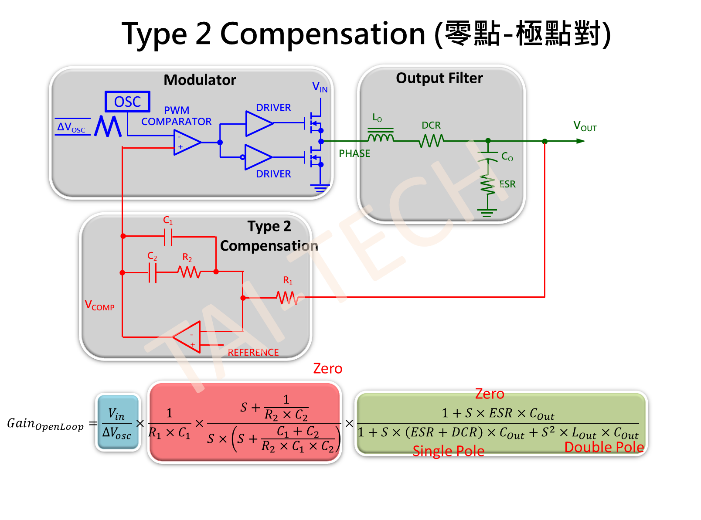
Type 2 Compensation
在低頻提供一個Zero,低頻Phase 上升90°,對於Phase Margin有幫忙。
在高頻提供一個Pole,高頻提供一個-20 dB斜率下降增益,可控制頻寬及抑制高頻雜訊增益。
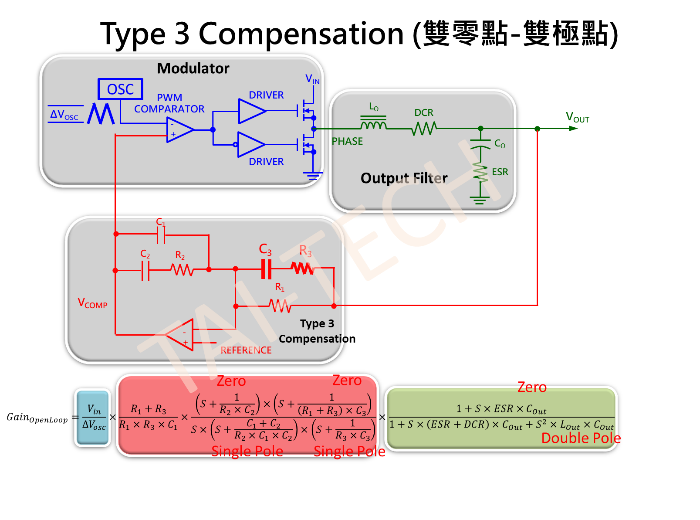
Type 3 Compensation
在低頻提供兩個Zero,低頻Phase 上升180°,對於Phase Margin有幫忙。
在高頻提供兩個Pole,高頻提供兩個-20dB斜率下降增益 (部分設計在同一頻率點,則成為一個Double Pole),可控制頻寬及抑制高頻雜訊增益。
補償電路設計順序
在進行補償電路之前,必須完成Buck其它的電路設計及選料。
Buck IC決定了Control Mode
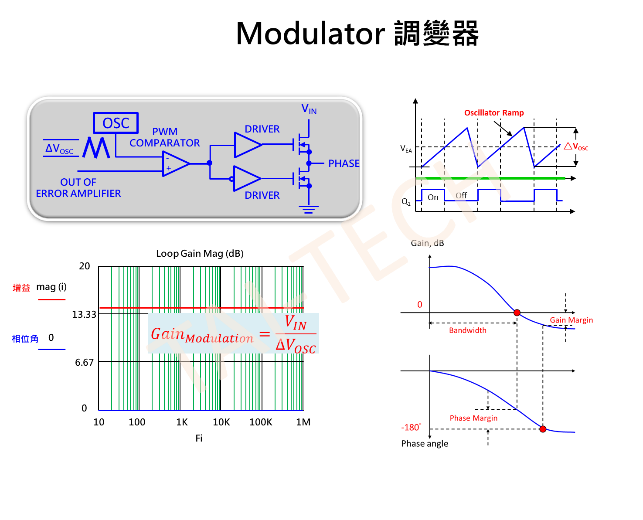
V
IN
& Buck IC (△V
OSC
)決定了Modulation Gain
L
OUT
& C
OUT
決定了Double Pole頻率點 (F
LC
)
輸出電容ESR決定了輸出電容貢獻Zero頻率點 (F
ESR
)
下列以Type 2介紹補償電路設計順序,零件位置可參考上面Type 2電路圖,詳細公式或者Type 3設計可參考Intersil tb417 compensation application notes
Step1:選擇2KΩ≦R1≦5KΩ
Step2:透過 R2/R1 設計Type2 Open Loop Gain,進而影響整個Closed Loop 期望BW。
Step3:選擇C2讓Type 2 Zero頻率,設計在輸出濾波器Double Pole頻率 (F
ZERO
= F
LC
)
Step4:選擇C1讓Type 2 Pole頻率,設計在1/2 切換頻率 (F
POLE
= 1/2 * F
SW
)
綜合Control Mode & Output Filter & ESR & Compensation的應用彙整表如下:
Previous
回到列表
Next